
Nanyang Technological University, Singapore
School of Computer Science and Engineering(SCSE)
Final Year Project: SCE17-0434
Reinforcement Learning for Self-Driving Cars
This project is a Final Year Project carried out by Ho Song Yan from Nanyang Technological University, Singapore.
Abstract
This project implements reinforcement learning to generate a self-driving car-agent with deep learning network to maximize its speed. The convolutional neural network was implemented to extract features from a matrix representing the environment mapping of self-driving car. The model acts as value functions for five actions estimating future rewards. The model is trained under Q-learning algorithm in a simulation built to simulate traffic condition of seven-lane expressway. After continuous training for 2340 minutes, the model learns the control policies for different traffic conditions and reaches an average speed 94 km/h compared to maximum speed of 110 km/h.
Simulator
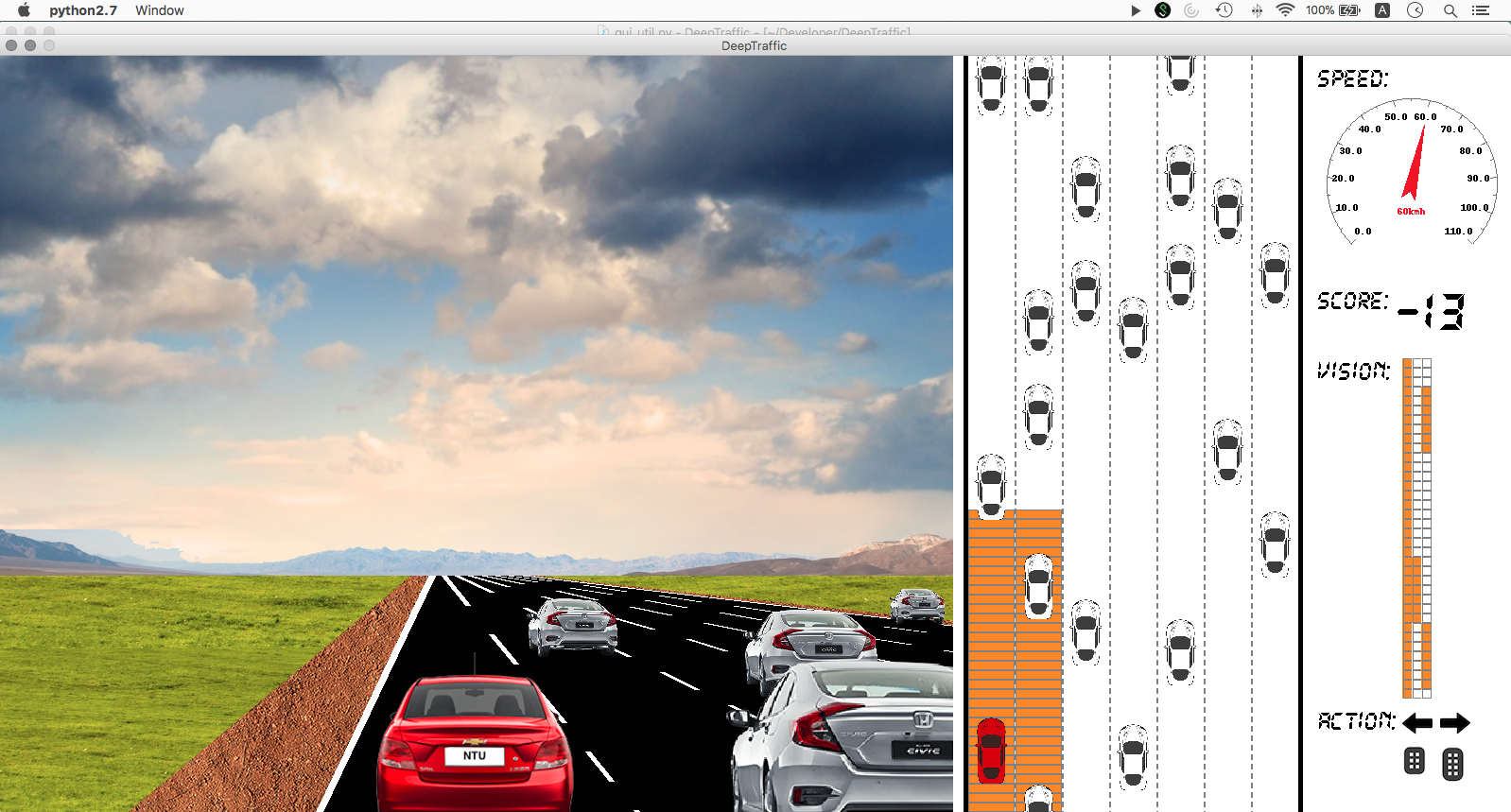 Simulator running under macOS High Sierra environment
Simulator running under macOS High Sierra environment
Requirements
- Tensorflow
- pygame
- NumPy
- PIL
Model architecture
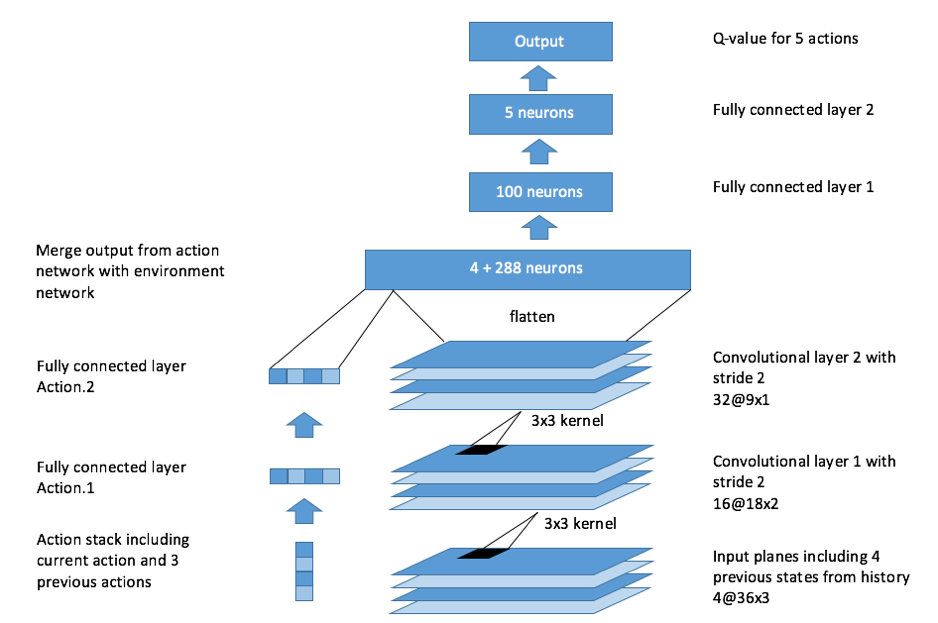 High level model architecture design
High level model architecture design
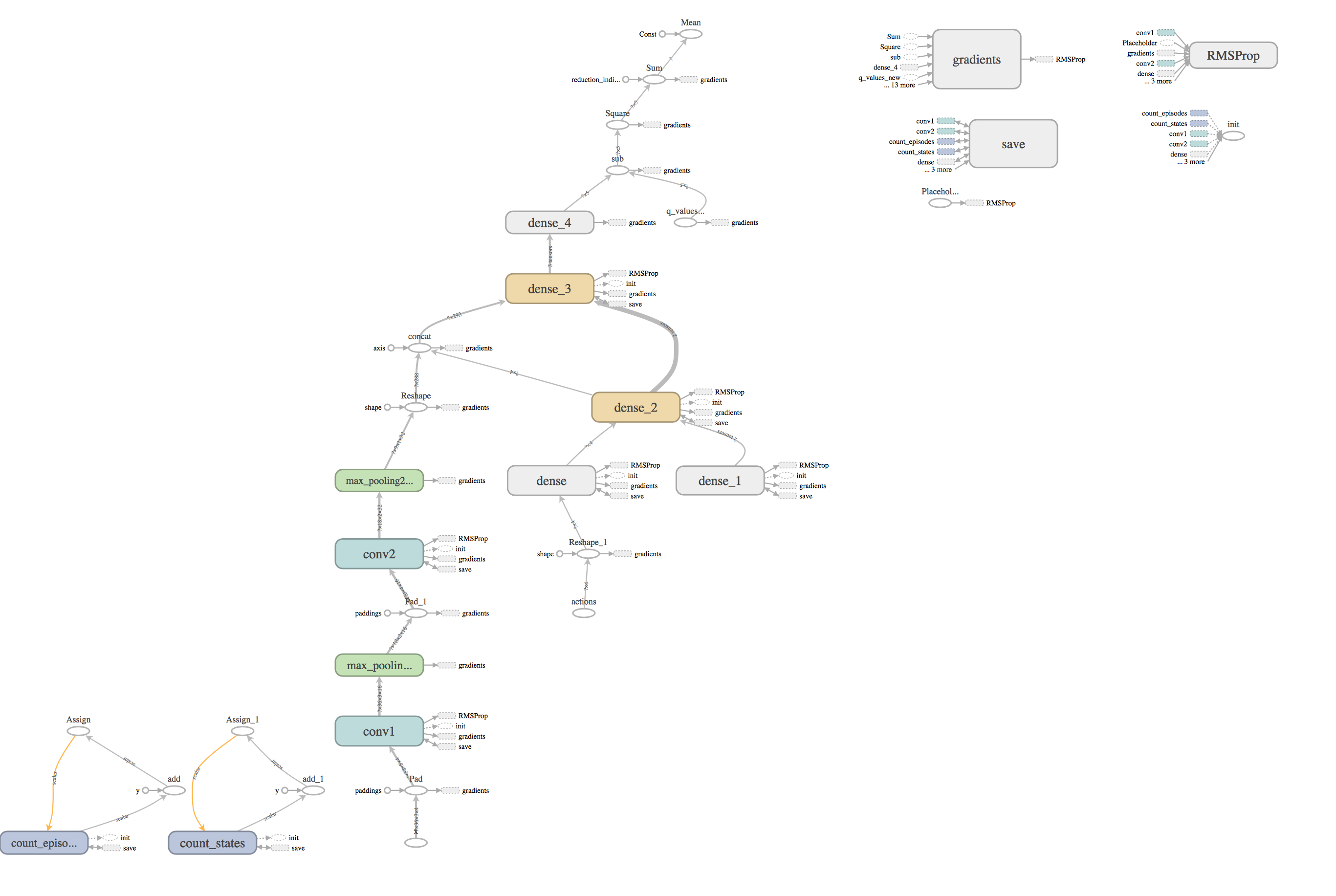 Graph structure in Tensorflow
Graph structure in Tensorflow
Results
Average speed
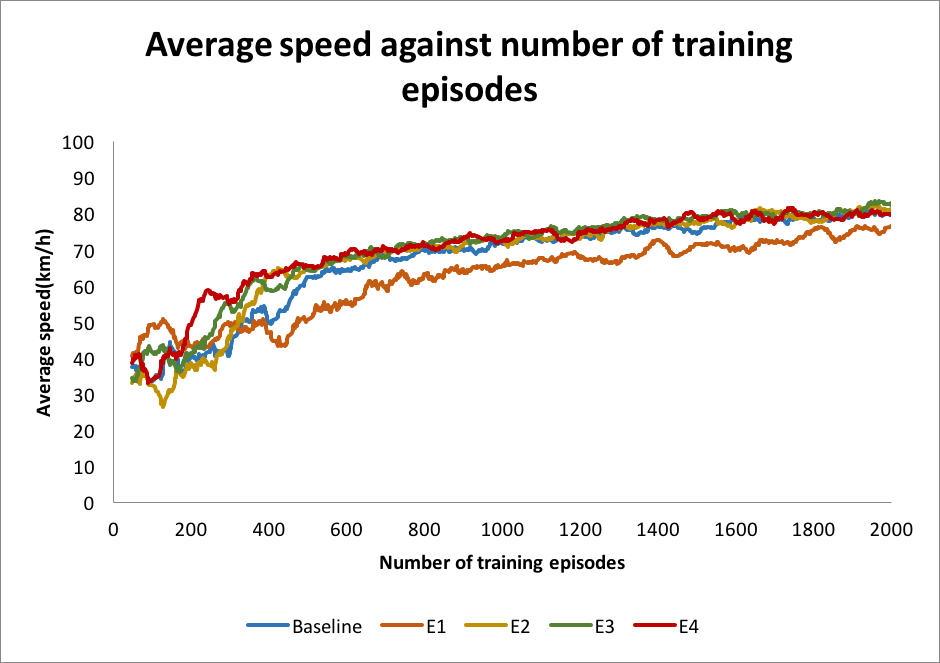 Average speed against number of training episode
Average speed against number of training episode
Score
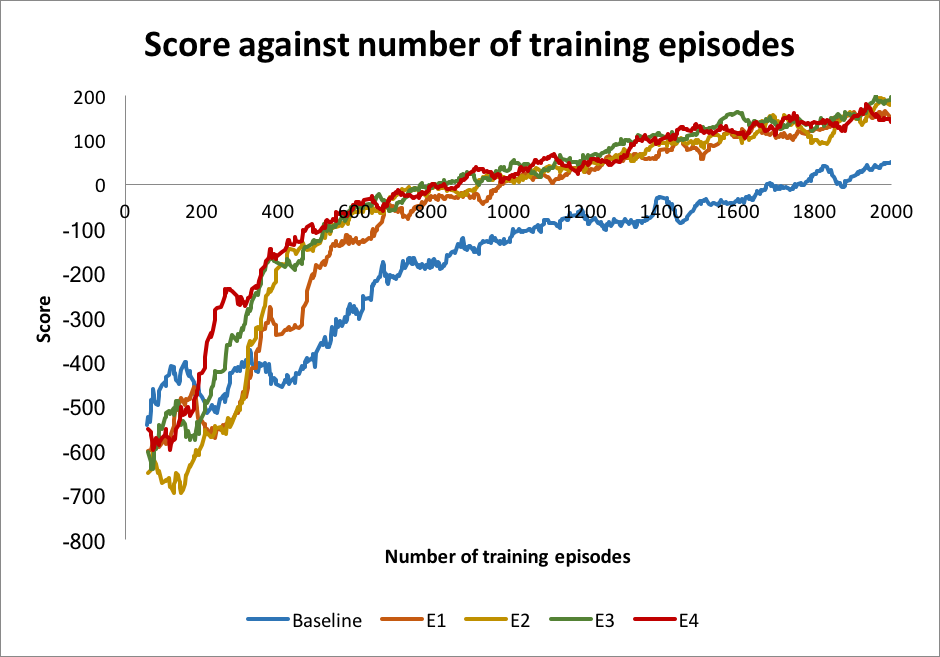 Score against number of training episode
Score against number of training episode
Training loss
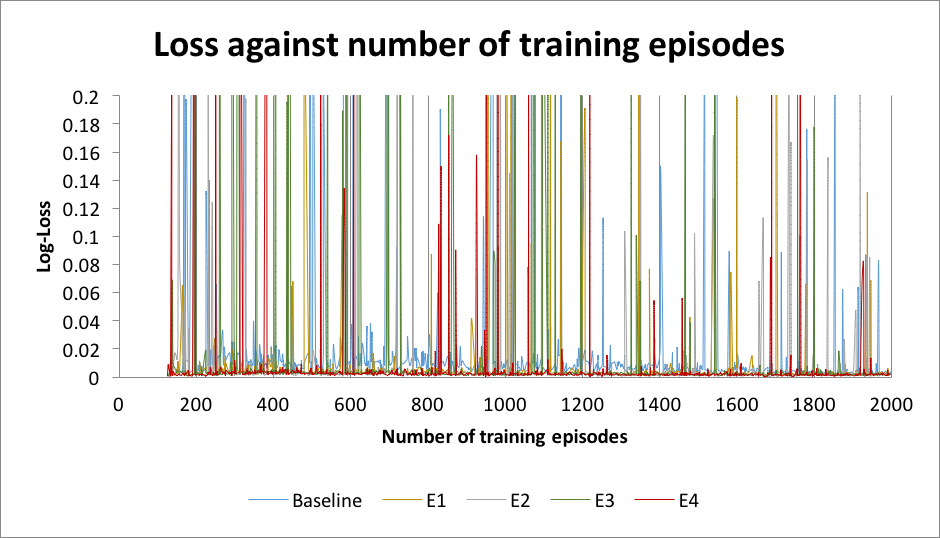 Loss against number of training episode
Loss against number of training episode
Sum of Q-values
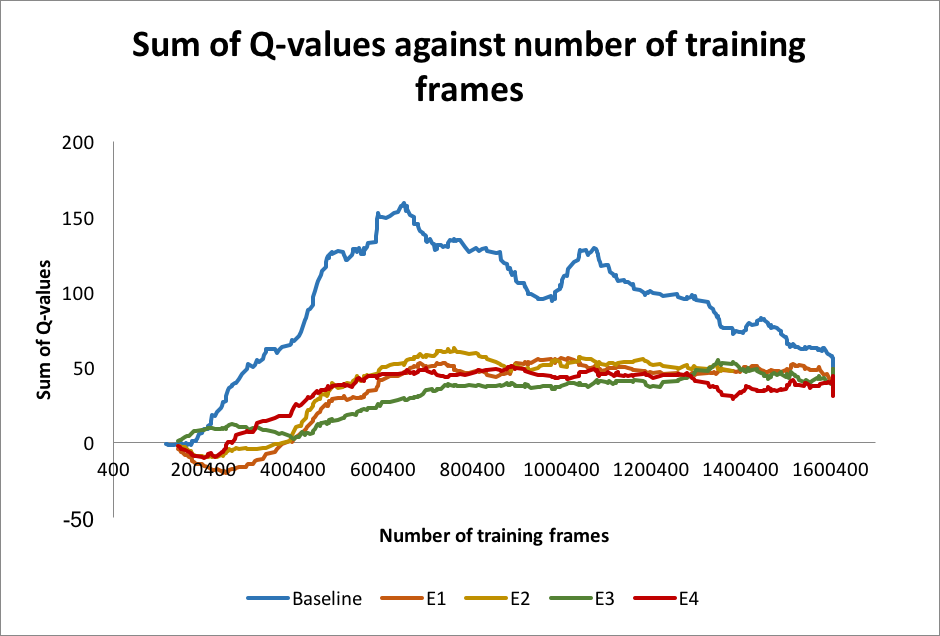 Sum of Q-values against number of training episode
Sum of Q-values against number of training episode
Evaluation
| Traffic condition |
Description |
| 1. Light traffic |
Maximum 20 cars are simulated with plenty room for overtaking. |
| 2. Medium traffic |
Maximum 40 cars are simulated with lesser chance to overtake other cars. |
| 3. Heavy traffic |
Maximum 60 cars are simulated to simulate heavy traffic. |
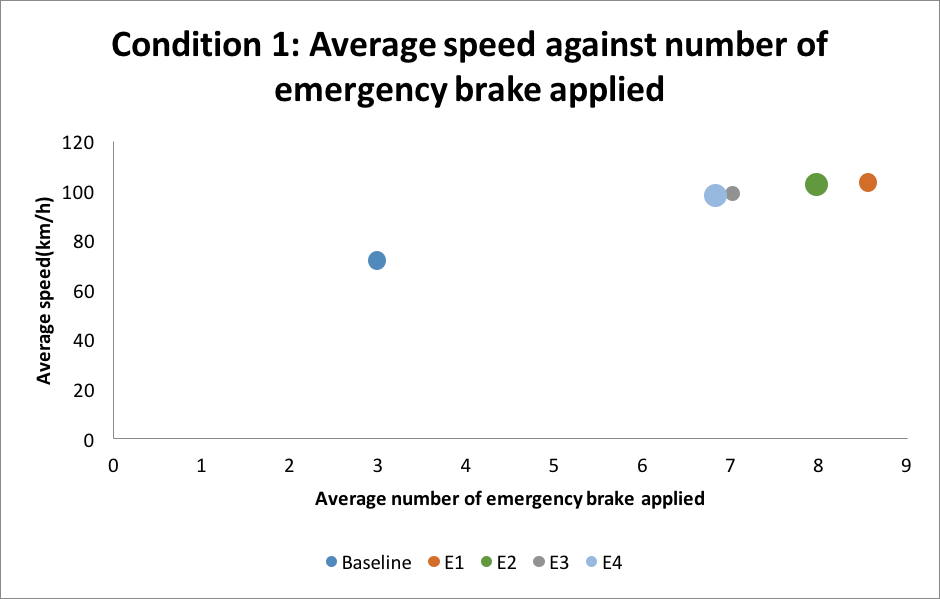 Condition 1: Average speed against average number of emergency brake applied
Condition 1: Average speed against average number of emergency brake applied
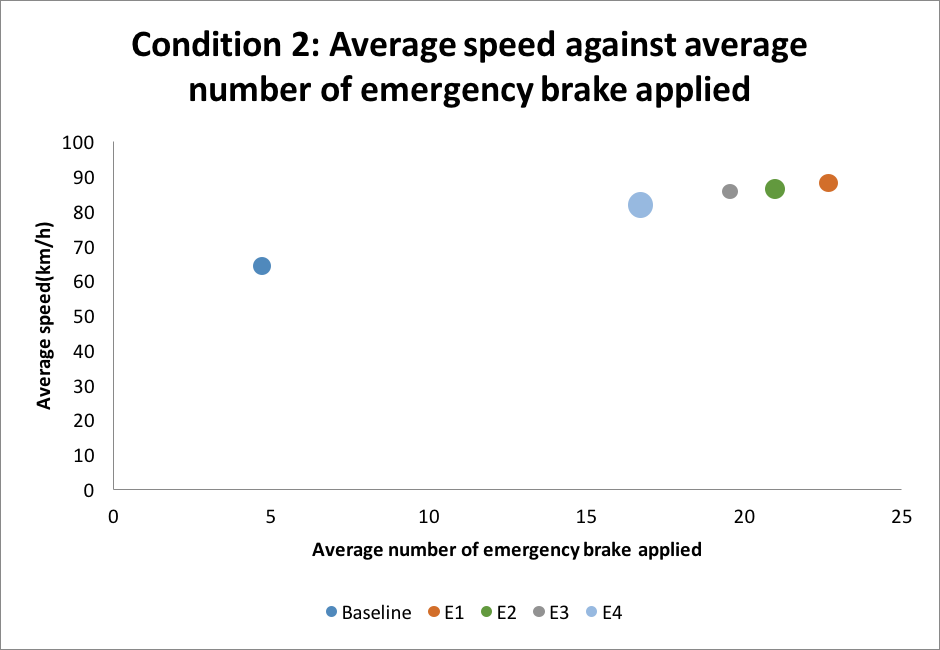 Condition 2: Average speed against average number of emergency brake applied
Condition 2: Average speed against average number of emergency brake applied
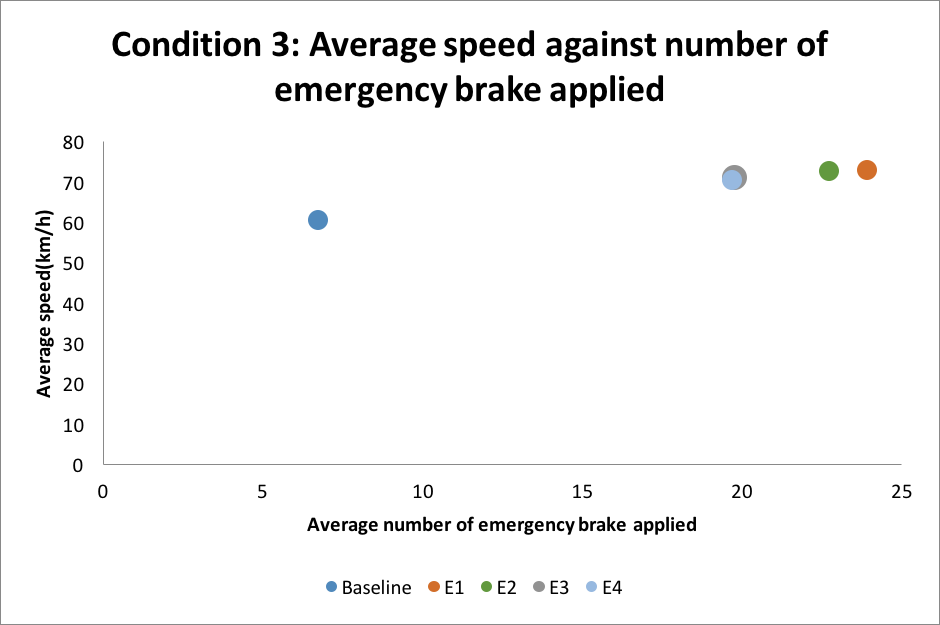 Condition 3: Average speed against average number of emergency brake applied
Condition 3: Average speed against average number of emergency brake applied
Biblography
- Sallab, A.E., Abdou, M., Perot, E., and Yogamani, S.: ‘Deep reinforcement learning framework for autonomous driving’, Electronic Imaging, 2017, 2017, (19), pp. 70-76
- Sutton, R.S.: ‘Learning to predict by the methods of temporal differences’, Machine learning, 1988, 3, (1), pp. 9-44
- Bellemare, M.G., Veness, J., and Bowling, M.: ‘Investigating Contingency Awareness Using Atari 2600 Games’, in Editor (Ed.)^(Eds.): ‘Book Investigating Contingency Awareness Using Atari 2600 Games’ (2012, edn.), pp.
- Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A., Antonoglou, I., Wierstra, D., and Riedmiller, M.: ‘Playing atari with deep reinforcement learning’, arXiv preprint arXiv:1312.5602, 2013
- Bojarski, M., Del Testa, D., Dworakowski, D., Firner, B., Flepp, B., Goyal, P., Jackel, L.D., Monfort, M., Muller, U., and Zhang, J.: ‘End to end learning for self-driving cars’, arXiv preprint arXiv:1604.07316, 2016
- Chen, C., Seff, A., Kornhauser, A., and Xiao, J.: ‘Deepdriving: Learning affordance for direct perception in autonomous driving’, in Editor (Ed.)^(Eds.): ‘Book Deepdriving: Learning affordance for direct perception in autonomous driving’ (2015, edn.), pp. 2722-2730
- Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A.A., Veness, J., Bellemare, M.G., Graves, A., Riedmiller, M., Fidjeland, A.K., and Ostrovski, G.: ‘Human-level control through deep reinforcement learning’, Nature, 2015, 518, (7540), pp. 529-533
- Yu, A., Palefsky-Smith, R., and Bedi, R.: ‘Deep Reinforcement Learning for Simulated Autonomous Vehicle Control’, Course Project Reports: Winter, 2016, pp. 1-7