![]()

Computer Vision library for FTC based on OpenCV, featuring beacon color and position detection, as well as an easy-to-use VisionOpMode format and many additional detection features planned in the future.
git clone --depth=1 https://github.com/lasarobotics/ftcvision.ftc-visionlib and opencv-java folders into your existing robot controller app.Project mode selected in the project browser window (so you can see all of the files in your project).settings.gradle file and append the following two lines:
include ':opencv-java'
include ':ftc-visionlib'AndroidManifest.xml file in your app's FTCRobotController/src/main folder.uses-permission tag in AndroidManifest.xml just below the <mainfest ...> tag and just before the application tag:
<uses-permission android:name="android.permission.CAMERA" android:required="true" />FTCRobotController/build.release.gradle AND TeamCode/build.release.gradle files and insert the following lines under dependencies into both files:
compile project(':ftc-visionlib')
compile project(':opencv-java')VisionSample.java, located in [vision-root]/ftc-robotcontroller/src/main/java/com/qualcomm/ftcrobotcontroller/opmodes) from the FTCVision directory into a folder within the TeamCode directory (where your place any other opmode).@Autonomous) in order to get them to work for your version of the SDK.VisionOpMode!ftc-cameratest into the root of your project. Then, add include ':ftc-cameratest' to your settings.gradle in the root of your project. To run the camera test app, click the green "Sync Project with Gradle Files" button to update your project, then select ftc-cameratest from the dropdown next to the run button.When installing via Git submodule, every person cloning your repo will need to run git submodule init and git subomodule update for every new clone. However, you also get the advantage of not copying all the files yourself and you can update the project to the latest version easily by navigating inside the ftc-vision folder then running git pull.
git submodule init
git submodule add https://github.com/lasarobotics/ftcvision ftc-visionftc-vision folder and thus directories will need to be modified. Once you get to the step that modifies settings.gradle, add the following lines:
project(':opencv-java').projectDir = new File('ftc-vision/opencv-java')
project(':ftc-visionlib').projectDir = new File('ftc-vision/ftc-visionlib')
project(':ftc-cameratest').projectDir = new File('ftc-vision/ftc-cameratest') <- only if you want to enable the camera testing appVisionOpMode!git clone --depth=1 https://github.com/lasarobotics/ftcvision.ftc-robotcontroller. Then, modify the FtcOpModeRegister appropriately to add your custom OpModes.VisionOpMode!This library is complete as of World Championship 2016. If you have any questions or would like to help, send a note to smo-key (contact info on profile) or open an issue. Thank you!
Documentation for the stable library is available at http://ftcvision.lasarobotics.org.
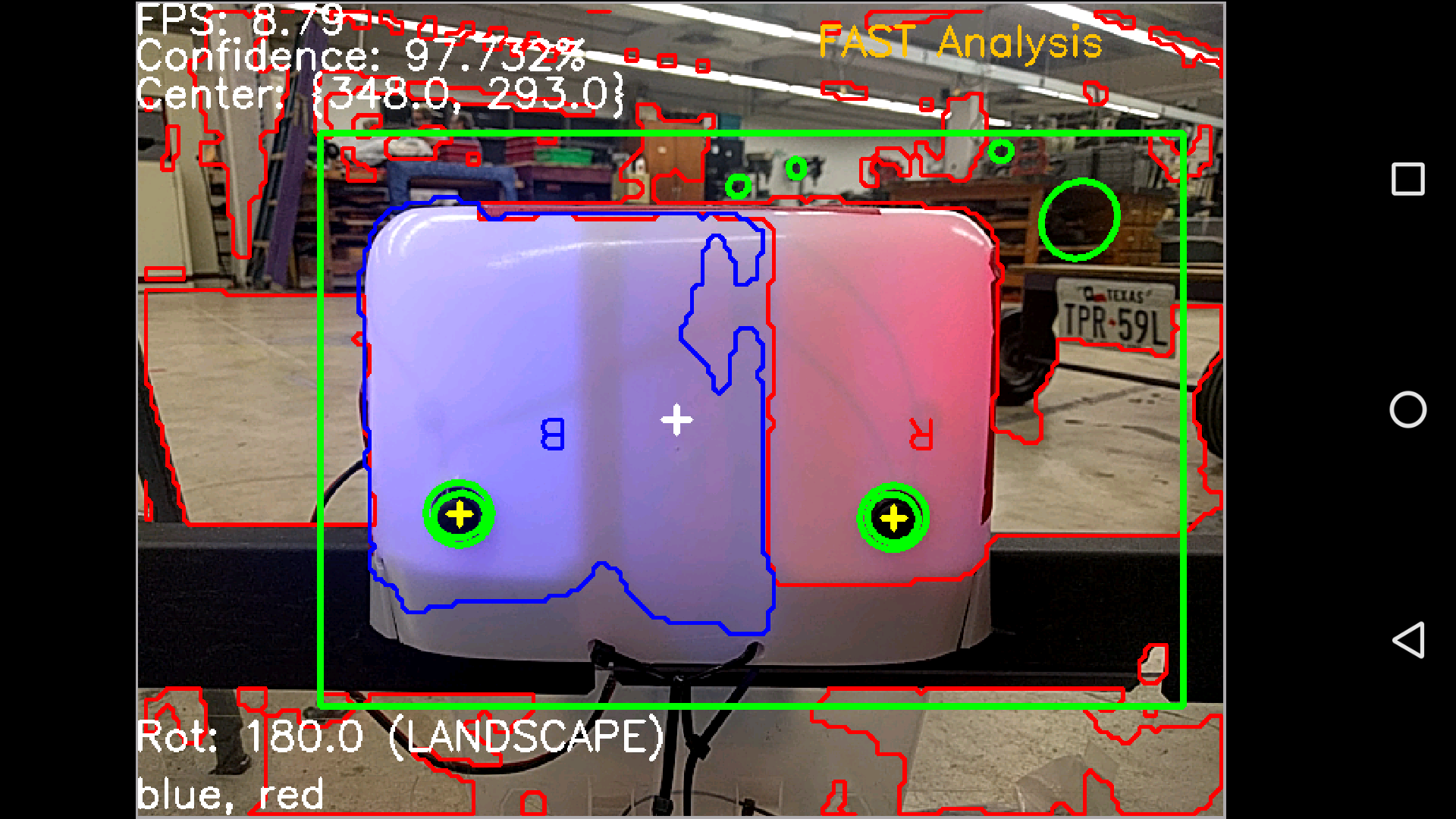
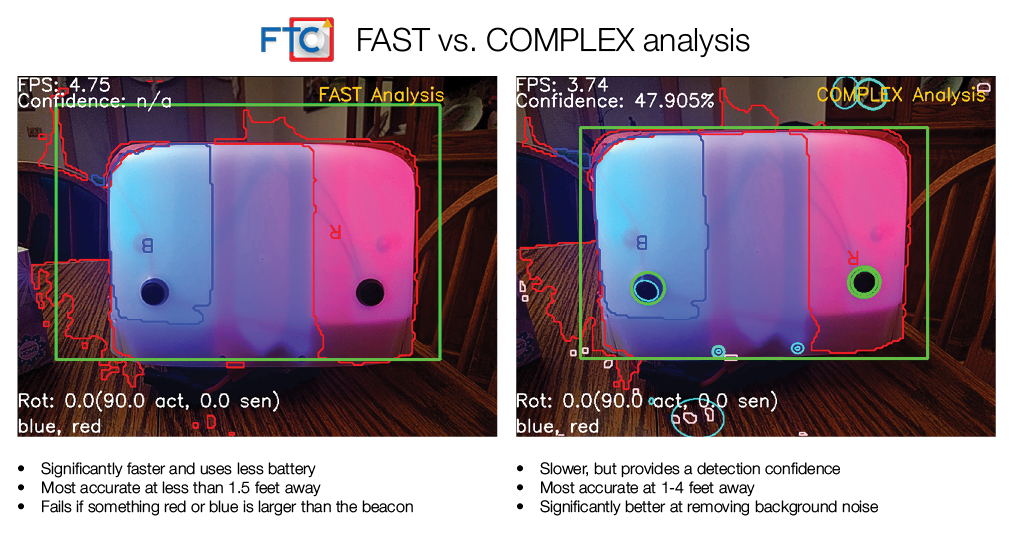
Yes! FTCVision can detect a beacon 0.5-4 feet away with 90% accuracy in 0.2 seconds. Here are some pictures. :smiley:


OpMode scheme created so that the robot controller does not need to be modified to use the app.